



Schritt für Schritt V2 Connect System
Schritt für Schritt mit dem CNC Connect System V2 gilt für die IP-A
Es gibt einige Punkte die offensichtlich noch nicht klar genug sind, oder unsere Kunden lesen die Anleitung nicht?
Schritt 1:
Überprüfen Sie die Einstellungen der Servo Drive
Delta Servo:
Neben den Ein und Ausgangsignalen sind folgende Einstellungen wichtig wenn Sie mit der IP-A und dem CNC Connect System V2 arbeiten.
Die Parameter für B2 - B3 und A2 sind gleich, wobei die Parameter der B3 nicht P1-01 sondern
P1-001 heißt.
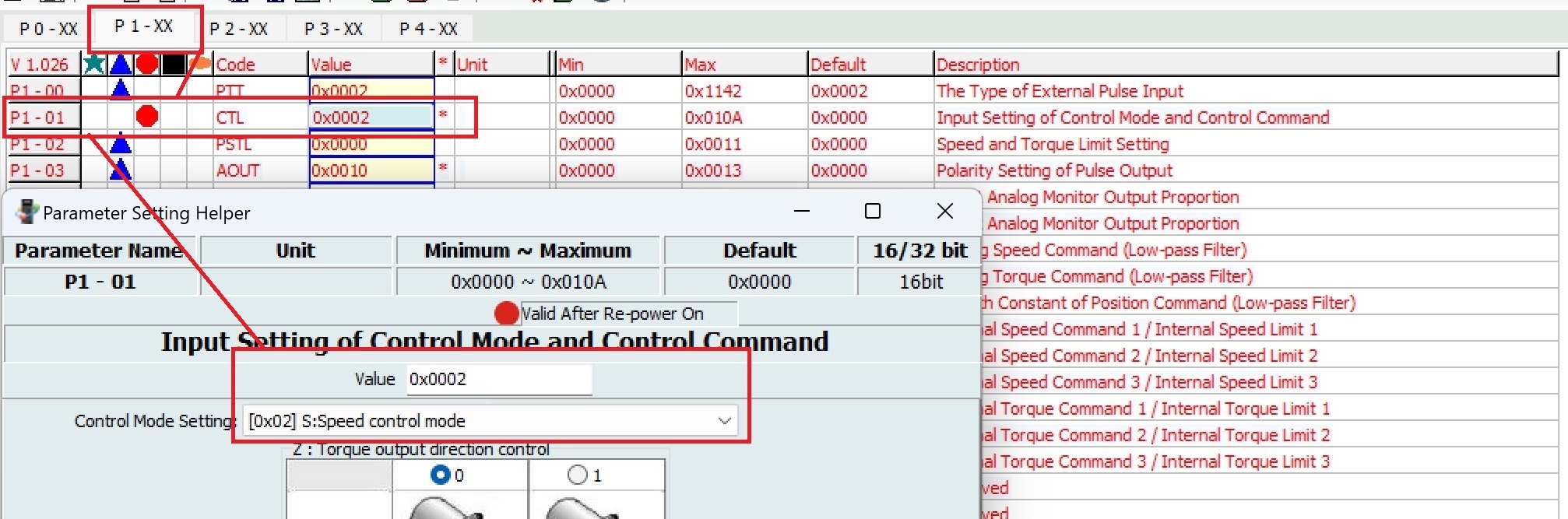
Setzen Sie den Parameter P1-01: auf 0x0002
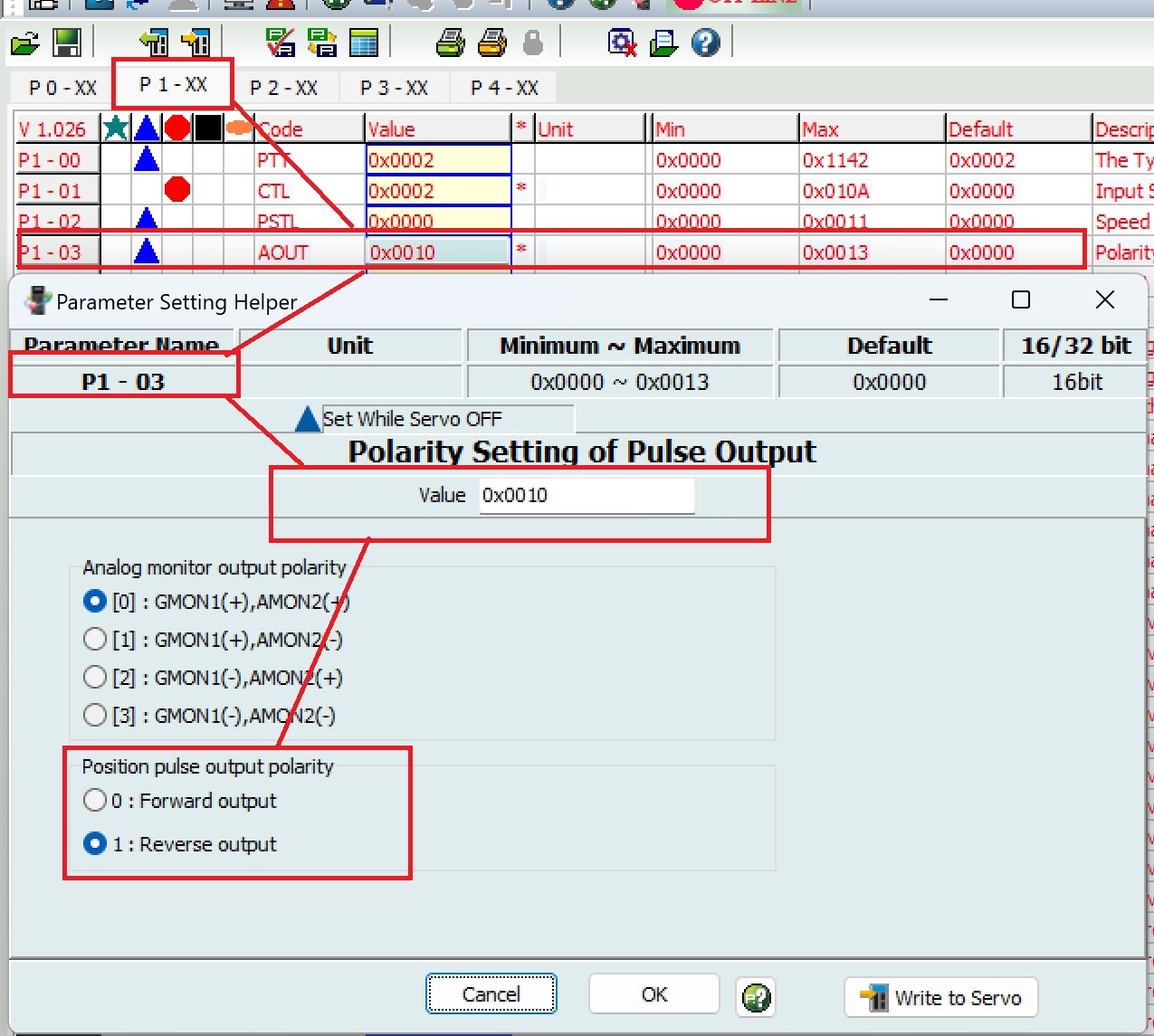
Sie können den Parameter P1-03 auf 0x0010 setzen. Das Bedeutet das Sie die Auswertung der Encodersignale nicht in der Software umkehren müssen.
Hier finden Sie Servoparameter für die B3 Servodrive : Parameter
Wer mit der Hand die Parameter einstellen möchten:
B3 L Version
Folgende PIN Belegung haben Sie an Ihrer Aufsteckversion wenn die die B3 L Version haben
Parameter für B3 L und M Version
P1.002 auf 0x0002
P1.003 auf 0x0010
P1.056 auf 500 oder anderen Wert stellen, diese Impulsanzahl wird von den Endstufen pro Motorumdrehung ausgegeben.
Parameter Gruppe 2 der B3-L Version :
P2.010 DI 1 = 0x0101 (Servo On)
P2.011 DI 2 = 0x0100
P2.012 DI 3 = 0x0100
P2.013 DI 4 = 0x0100
P2.014 DI 5 = 0x0102 (Alarm Reset)
P2.015 DI 6 = 0x0100
P2.016 DI 7 = 0x0100
P2.017 DI 8 = 0x 0021 ( Not Aus)
P2.018 DO 1 = 0x0001 (Servo Ready) **
P2.019 DO 2 = 0x0100
P2.020 DO 3= 0x0100
P2.021 DO 4 =0x0108 (Bremsenausgang) Bei Endstufen ohne Bremse den Wert auf 0x0100 setzen.
P2.022 DO 5 =0x0107 (Servo Alarm)
Parameter Gruppe 2 der B3-M Version :
P2.010 DI 1 = 0x0101 (Servo On)
P2.011 DI 2 = 0x0100 (Not Aus)
P2.012 DI 3 = 0x0100 (Alarm Reset)
P2.013 DI 4 = 0x0100
P2.018 DO 1 = 0x0001 (Servo Ready)
P2.019 DO 2 = 0x0100 (Bremsenausgang) Bei Endstufen ohne Bremse den Wert auf 0x0100 setzen.
Nach Abschluss muss die Servodrive im Display nur noch 000000 anzeigen und keinen AL
Schritt 2 : SIM Software
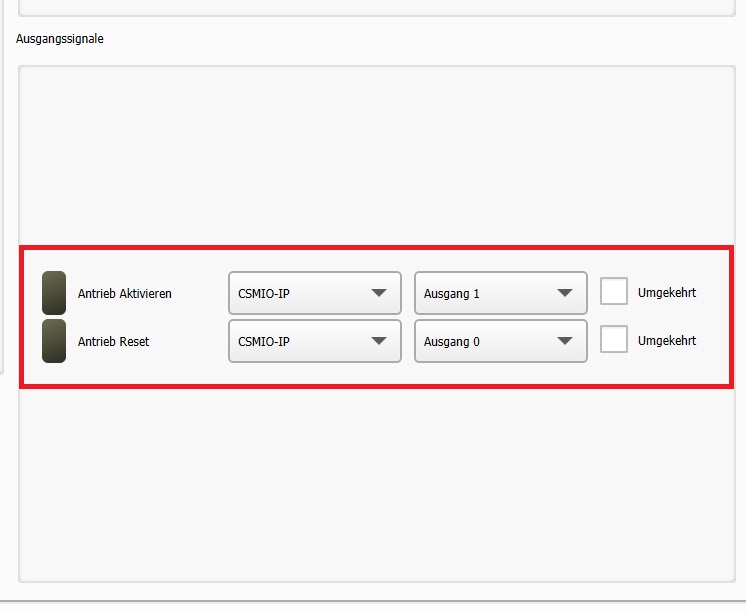
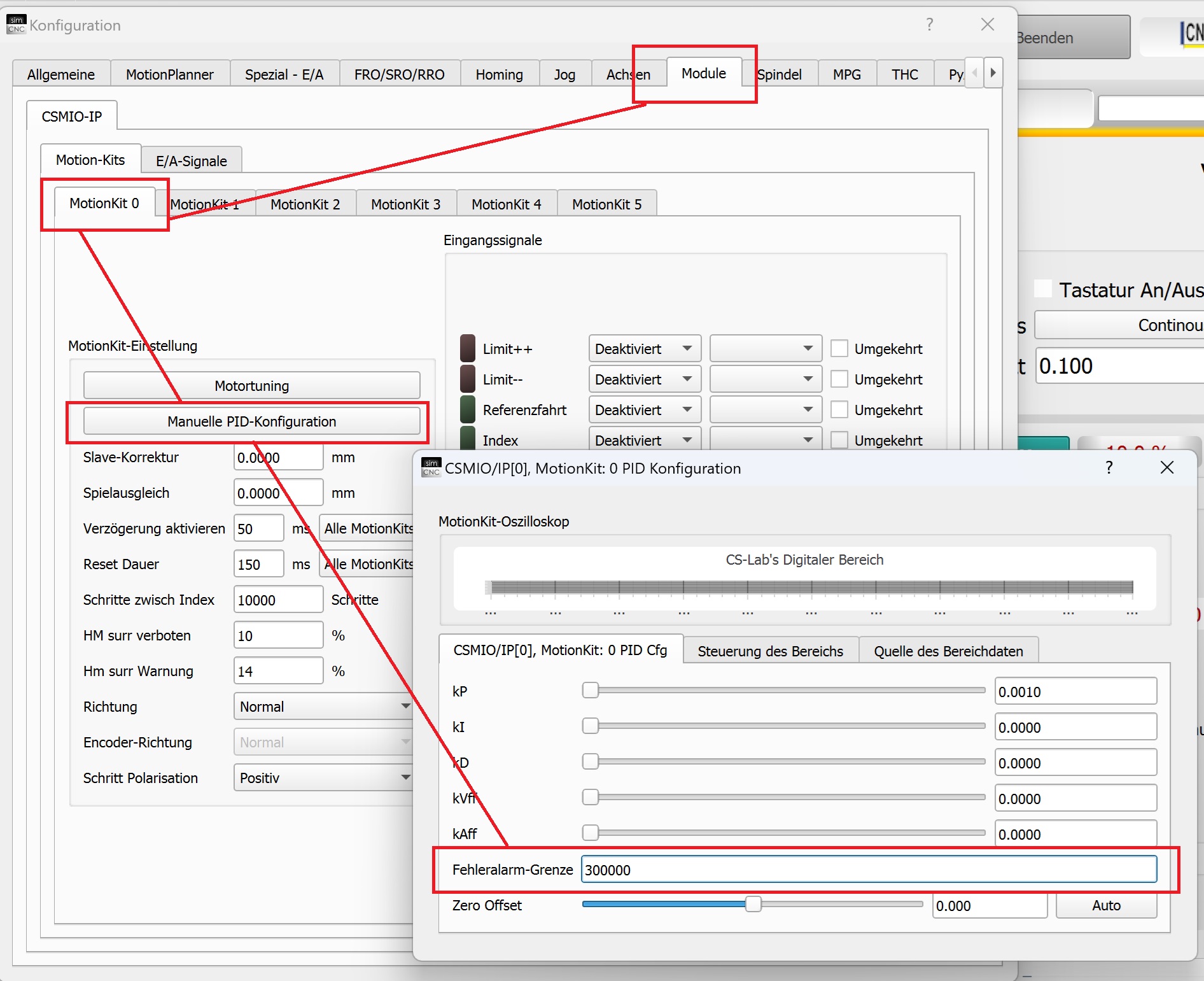
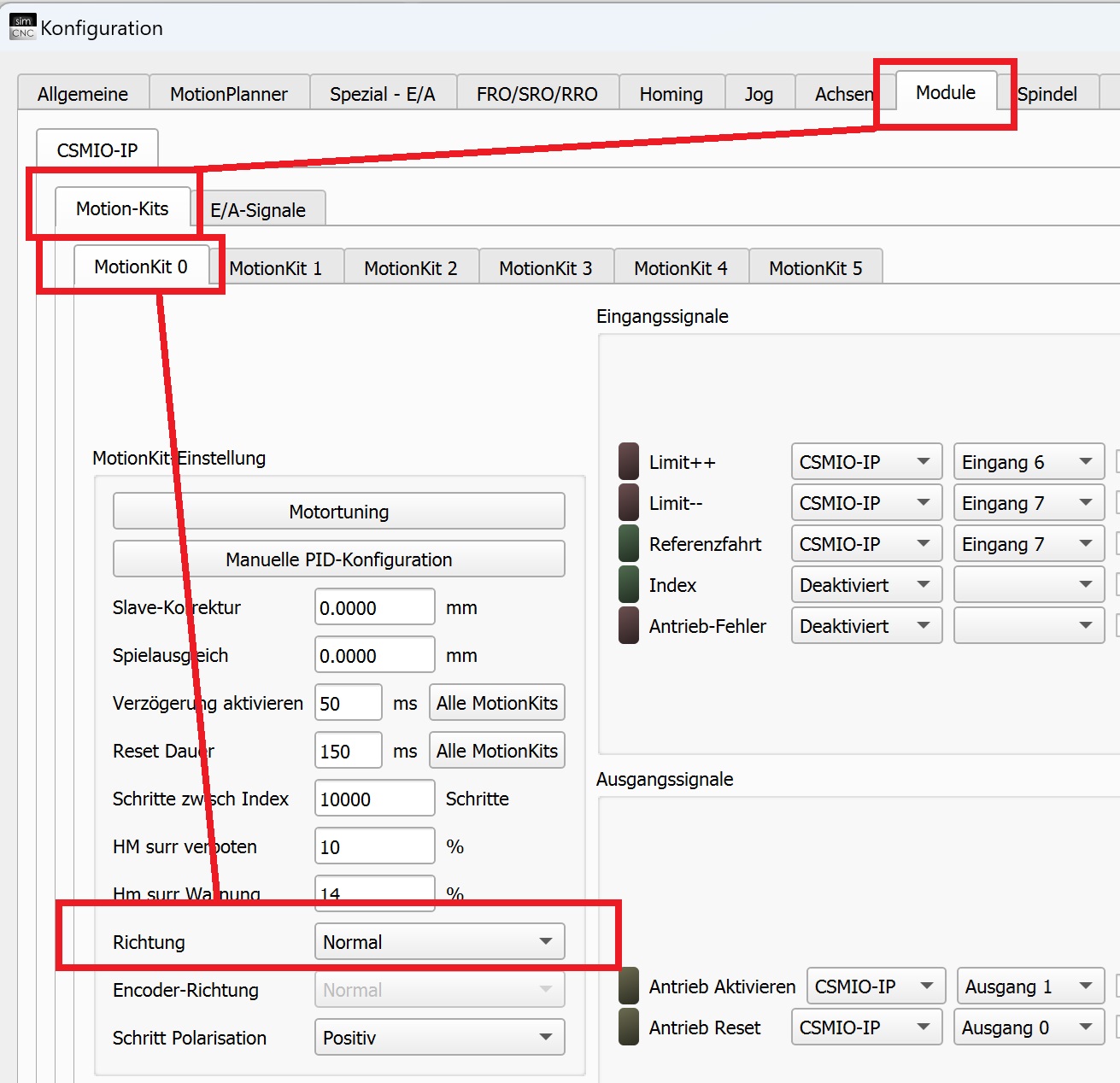
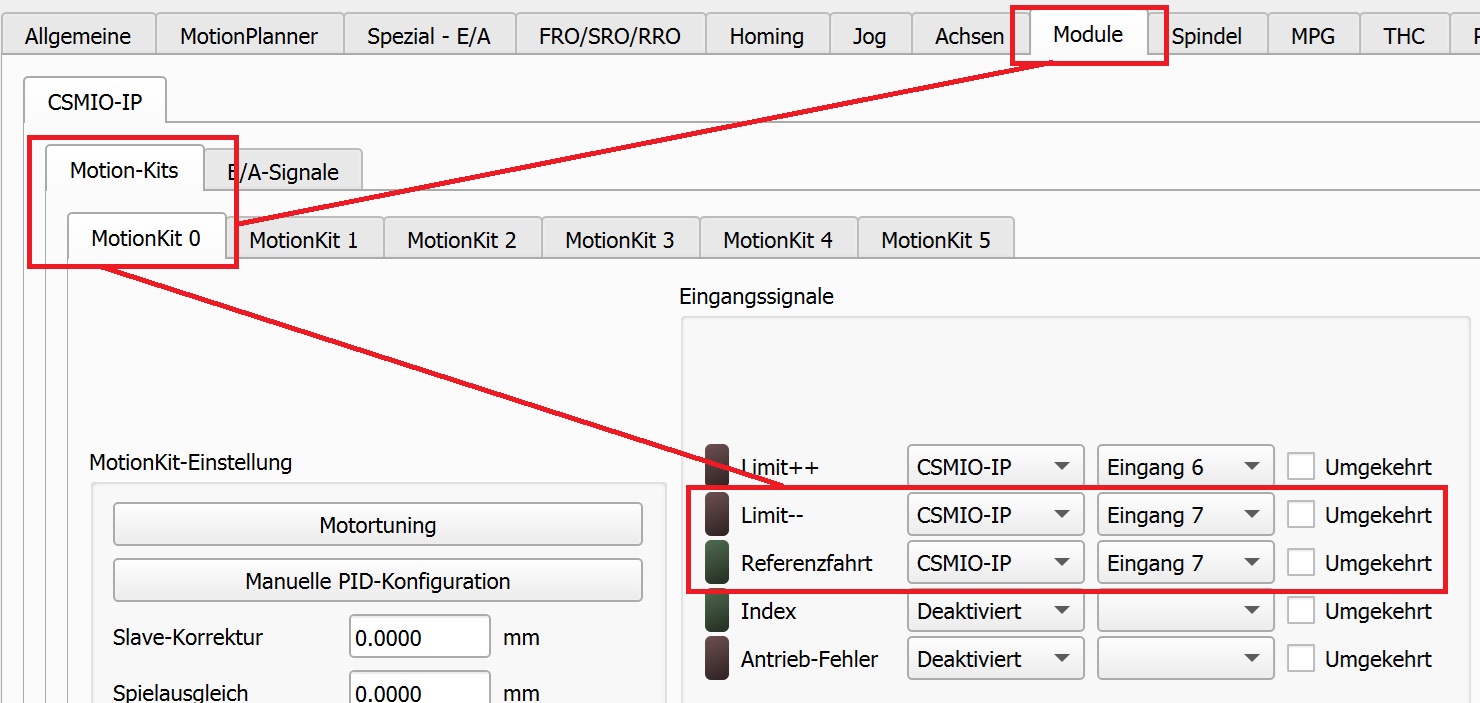
Weisen Sie die Ausgänge zu. Gehen Sie in die Einstellungen - Module - Motion Kit 0
und tragen Sie bei Antrieb Reset den Ausgang 0 ein. Bei Antrieb aktivieren weisen Sie den Ausgang 1 zu .
Diese Signale sind für alle Achsen zuständig da diese im CNC Connect System intern auf alle Aufsteckplatinen gehen.
Diese Einstellungen sind für alle Arten der Drives gleich.
Nochmal: Weisen Sie diese Einstellungen einer Achse zu. Die Signale werden intern auf alle anderen Drives verteilt.
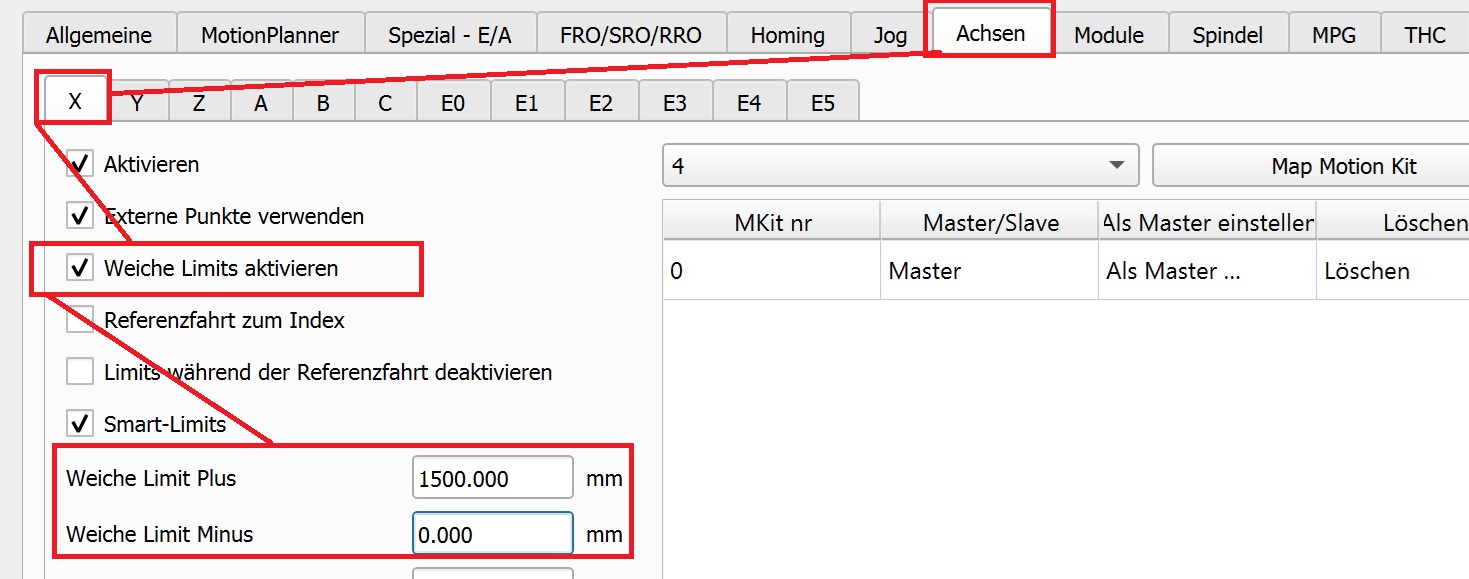
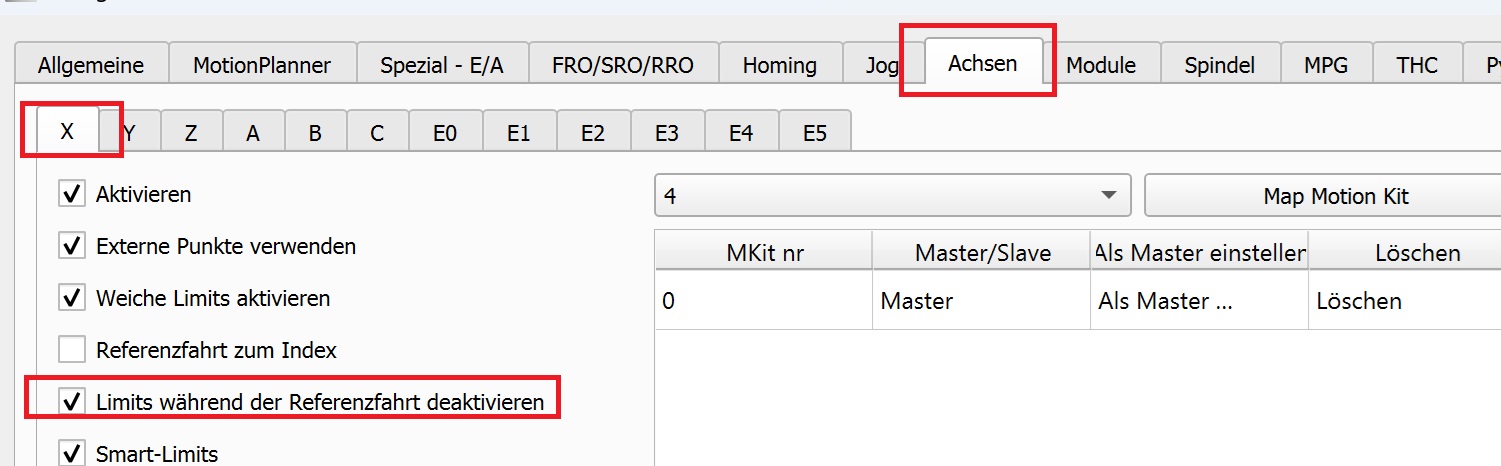
Weisen Sie allen Achsen die Endlagen zu. Überprüfen Sie die Funktionen.
Wer den Parameter P1-03 auf 0x0010 gesetzt hat, kann bei den Motionkit´s die Richtung der
Encoder-Richtung auf normal lassen.

Stellen Sie im Motortuning die Schritte die Sie pro mm fahren ein und fangen Sie mit einer kleinen Geschwindigkeit an.

Module - Motion-Kits-Motionkit- Richtung
- Dann die maximale Geschwindigkeit ermitteln, erhöhen Sie die Geschwindigkeit ohne die Auflösung zu ändern. Erhöhen sie nur die Geschwindigkeit.

Achsen-X- Richtung Referenzfahrt
- Negative = fährt in Richtung Minus
- Positive = fährt in Richtung Positive
Achsen - X- Geschwindigkeit der Referenzfahrt

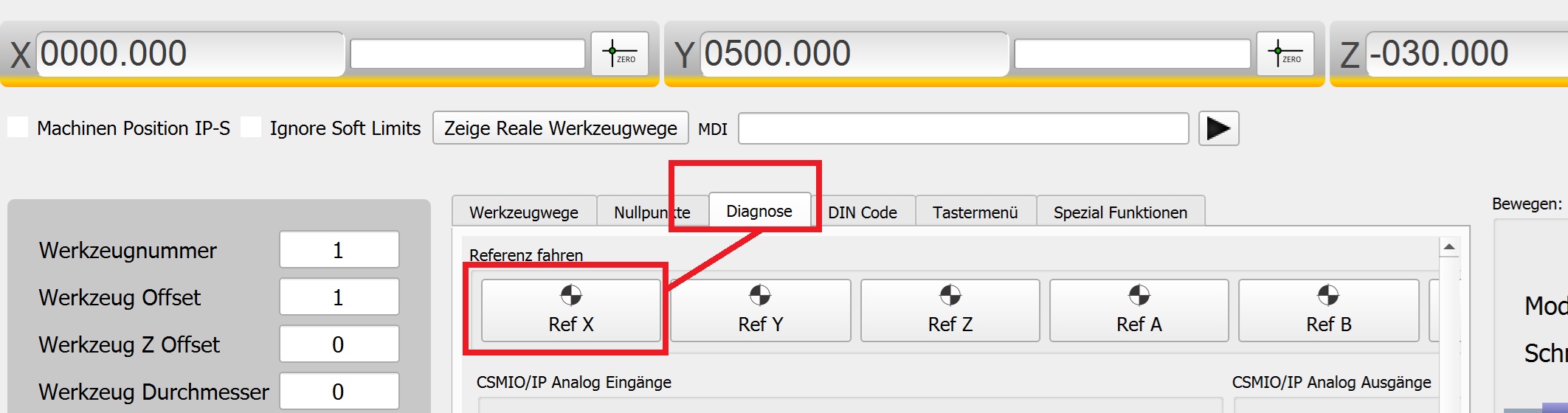
Nutzen Sie dazu den Diagnose Screen und wählen Sie die Achse aus die Sie Referenz fahren möchten. Diese Schaltflächen fahren nur die gewählte Achse und nicht alle aktivierten.

Kommentare (0)