



Die richtigen Motoren
Die Wahl entsprechender Motoren für die Maschine ist eine sehr individuelle Sache.
Hier möchten wir Ihnen den Unterschied zwischen Schritt- und Servomotoren kurz beschreiben.
Wie die Erfahrung zeigt, stehen viele Entwicklungsingenieure vor der Aufgabe, welchen Antrieb Sie verwenden möchten/müssen.
In der Vergangenheit wurden in einfacheren Maschinen aufgrund hoher Preise für Servomotoren so gut wie immer nur Schrittmotoren eingesetzt. Der technologische Fortschritt und die Verbreitung der Servo-Technik führen heutzutage dazu, dass es sich sogar beim Hobbybau einer Maschine lohnt, über die Wahl von Servoantrieben nachzudenken.
Der am häufigsten begangene Fehler bei der Entscheidungstreffung ist die Wahl der Leistung (und des Drehmoments) des Servoantriebs.
Es ist so, weil man sich durch Dreh- und Haltemoment beeinflussen lässt.
Das Drehmoment wird bei Servo- und das Haltemonent bei Schrittmotoren angegeben.
Beide werden am häufigsten in derselben Einheit Nm (Newtonmeter) genannt.
Bei der Wahl der Leistung eines Servoantriebs sollte man diese Parameter nicht miteinander vergleichen. Der für den Schrittmotor angeführte Haltemoment entspricht der Kraft, mit der die Welle des unter Spannung stehenden Motors im Ruhestand in ihrer Stellung gehalten wird.
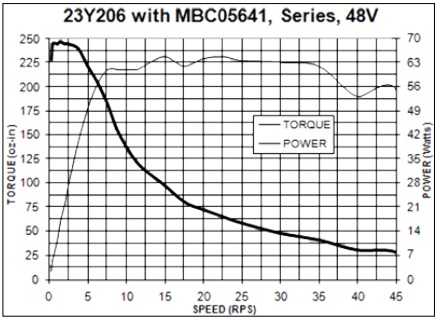
Bei sehr geringen Drehzahlen von etwa 200 UpM ist der Drehmoment annähernd gleichwertig (siehe die untenstehenden Abbildungen), mit steigender Drehzahl aber sinkt der Drehmoment, d.h. eigentlich die Kraft an der Welle, drastisch. Er sinkt bis auf so niedrige Werte, dass es oft vorkommt, dass der Motor bei 500 UpM keine Kraft mehr hat, um sich zu drehen, geschweige denn eine Maschine anzutreiben.
In einfachen Worten gesagt: der 3-Nm-Schrittmotor erreicht ein Haltemoment von 3 Nm im Stillstand und bei einer sehr niedriger Drehzahl (von etwa 200 UpM) und bei steigender Drehzahl nimmt seine Kraft schnell ab, indem sie den Nullwert anstrebt. Unten kann man das am Beispiel der Kennlinien eines Schrittmotors genau sehen.
Ganz anders sieht das bei Servomotoren aus.
Erstens werden da der Nenndrehmoment und die Nenndrehzahl angegeben.
Der 1-Nm/2000-UpM-Motor kann also im Dauerbetrieb bei 2000 UpM laufen und bei dieser Drehzahl an der Welle 1 Nm Drehmoment bieten.
Außerdem sind die Servomotoren durch noch ein sehr wichtiges Merkmal geprägt: Servomotoren können bis zu 3 Sekunden Ihre Leistung verdreifachen
Was bedeutet das? Dass der 1-Nm-Motor kann vorübergehend sogar 3 Nm (je nach Motortyp) aufbringen.
In Wirklichkeit entsteht die größte Belastung des Motors bei dynamischer Beschleunigung, das sind aber nur kurzzeitige Belastungen, bei denen die Möglichkeit der Motorüberlastung äußerst nützlich sein kann. Bei Einsatz einer Bewegungssteuerung mit schnellen STEP-Ausgängen wie bei der IP-S ist die maximale Schrittzahl, die damit erreicht werden kann, ein wichtiger Parameter des Motorantriebs.
Bei Steuerungen mit einer höheren STEP-Signal-Frequenz dürfen höhere Schrittteilungen (bei Schrittmotoren) oder Inkrementalgeber mit mehr Impulsen pro Umdrehung (bei Servomotoren) verwendet werden. Alles hat jedoch seine Vor- und Nachteile. Welche sind also die Nachteile der Servoantriebe? Sie sind bestimmt teurer.
Um wie viel? Das hängt schon davon ab, welche Schritt- und Servoantriebe miteinander verglichen werden.
Es gibt z.B. Schrittmotor-Steuerungen, die um die 600 Euro, und jene, die 40 Euro kosten (beide mit annähernd derselben Leistung!).
Generell kann man davon ausgehen, dass die Kombination Servomotor + Antrieb eine teurere Lösung ist.
Zu anderen Nachteilen der Servoantriebe gehören die Notwendigkeit, PID-Regler abzustimmen, und kompliziertere Verdrahtung. Dabei aber enden die Nachteile.
Ob sich der Anwender eine Servosteuerung leisten kann ist eine Entscheidung die muss er selber treffen, beim Einstellen der PID helfen wir Ihnen.0
Ihr großer Vorteil, der noch nicht erwähnt wurde, ist jedoch das, dass dank der Rückmeldung der Servoantrieb eine Überlastung oder einen Positionierfehler anzeigen kann. Wenn die IP-S-Steuerung ein derartiges Signal erhält, bringt sie die übrigen Achsen der Maschine sofort zum Stillstand. Bei Schrittmotoren liegt eine solche Rückmeldung nicht vor. Deshalb läuft die Maschine weiter, indem sie das Werkstück kaputt macht, selbst wenn z.B. aufgrund einer Überlastung eine der Achsen an der vorgegebenen Trajektorie nicht mehr festhält.
Zusammenfassend empfehlen wir, Servoantriebe zu verwenden. Ihre Nachteile sind gering im Vergleich zu den Vorteilen, die sie bieten. Es ist dabei jedoch zu berücksichtigen, dass der Servoantrieb einen viel niedrigeren Nennmoment aufweisen kann als der Haltemoment des Schrittmotors.
Wir erwähnten das vor allem, weil der Preisunterschied erheblich sein kann, wenn Sie einen 3-Nm-Schrittantrieb mit einem 3-NmServoantrieb vergleichen.
Wenn Sie aber einen 3-Nm-Schrittmotorantrieb mit einem 1-Nm-Servoantrieb vergleichen, schrumpft die Preisdistanz wesentlich weiter.
Aus der Praxis kann ein Fall angeführt werden, in dem mechanisch identische Maschinen ausgeführt mit 3-Nm-Schrittmotoren und 1-Nm-Servoantrieben verkauft wurden. Die Maschine mit Schrittmotoren erreichte maximal 7,5 m/min Vorschub mit einer Beschleunigung von 0,1 g. Jene mit Servoantrieben erreichte 20 m/min mit einer Beschleunigung von 0,4 g.
Wenn man die oben erwähnte Rückmeldung dazu hinzufügt, wird es zwecklos, weitere Vergleiche vorzunehmen. Selbstverständlich gehört die Wahl Ihnen. Bei einigen Lösungen sind Schrittmotoren völlig ausreichend und erweisen sich als sehr gut. Man kann nur hinzufügen, dass dank der ideal genauen Erzeugung des STEP-Taktsignals in der IP-S-Steuerung die Schrittmotoren sich viel besser verhalten als z.B. bei Steuerung über den LPT-Anschluss.
Es kann eine höhere Schrittteilung eingesetzt werden, wodurch die Motoren leiser und fließender laufen und dank verminderter Resonanz höhere Drehzahlen erreichen werden.
Bei unseren Delta Servosystemem bieten wir 3 Systeme an:
- B2 mit 160.000 Impulse je Umdrehung
- B3 mit 16.777,216 Impulse je Umdrehung
- A2 mit 1.280.00 Impulse je Umdrehung
Die Auflösung wird nicht direkt für die Maschine benötgt, sondern viel mehr für den seiden weichen Motorlauf. Derzeit werden Servosysteme mit 25000 (10.000) Impulse angeboten. Diese Systeme sind nicht für CNC Maschinen geeignet.
Dieses Systeme kommen eigentlich nur im Bereich Förderbänder und so weiter zum Einsatz.
Je höher das Feedback an die Endstufe ist um so früher erkennt das Servosystem was es machen muss.
Kommentare (0)