



Wie funktioniert ein analoges System?
Grundsätzliches:
Die Sollwertvorgabe wird mittels -/+ 10 Volt ausgeführt, wobei die Spannung dann die Geschwindigkeit vorgibt. Um nun exakt regeln zu können benötigen eine Strecke.
Die Strecke wird vom Maßstab oder den Encoder des Motors übermittelt.
Wird die Strecke über den Motorencoder ermittelt so müssen wir noch eine eventuelle Untersetzung und die Steigung der Spindel berücksichtigt werden. Die Encodersignale werden aus dem Motor über die Drive auf die IP-A geleitet, wobei die Drive durch ein Softwaregetriebe die Signale aufbereitet.
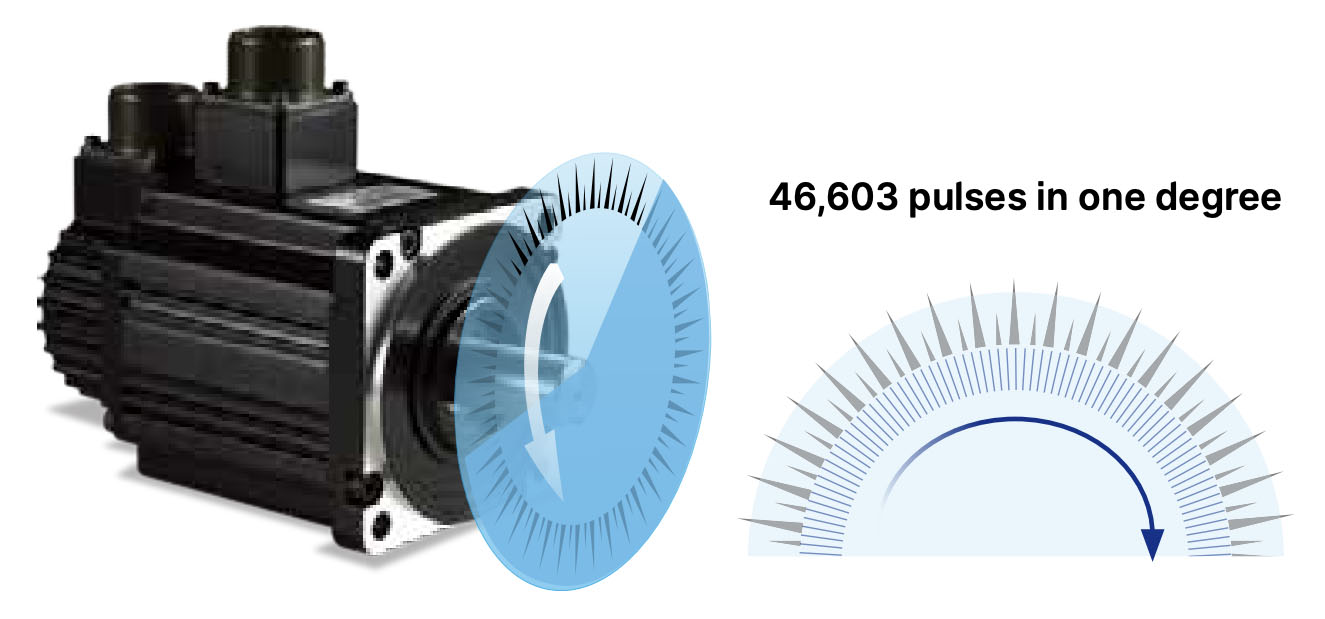
Beispiel: 16,7 Millionen Signale pro Umdrehung kommen vom Motor in die Drive, durch das Softwaregetriebe können wir nun sagen wieviele Signale von der Drive an die IP-A ausgegeben werden sollen.
Beispiel 500 Signale pro Umdrehung. Das bedeutet bei A-A/ und B-B/ haben wir je 4 Signale pro" Signal" was dann bedeutet wir müssen mit 500 x 4 rechnen.
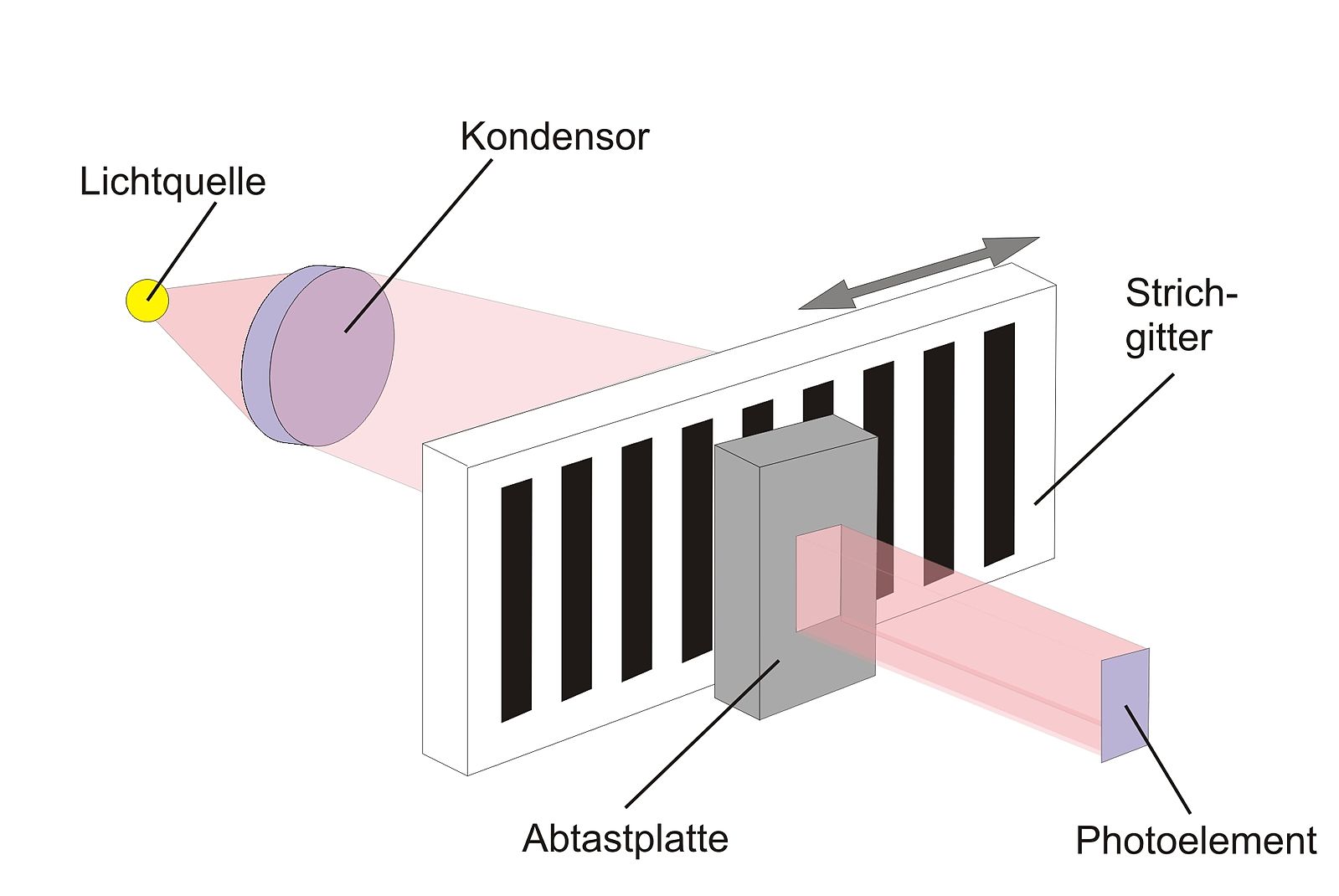
Bei einem Glasmaßstab wird die Auflösung durch den Maßstab selber vorgegeben, hier wird die Auflösung des Maßstabes die Genauigkeit vorgeben.
Mechanik:
Um eine stabile Regelung zu erhalten benötigen wir eine mechanisch einwandfreie Befestigung des Messsystems.
Wird der Motor zur Wegmessung genommen ist diese mechanische Genauigkeit gegeben. Wer mit einem externen Maßstab arbeitet, darf auch kein Umkehrspiel haben, denn der tote Gang innerhalb einer Spindel wird ja nicht vom Maßstab erkannt.
Ebenso erhalten wir auch eine unruhige Achse im Betrieb, die sich durch mangelnde Lageerkennung immer mehr aufschaukelt.
Wir empfehlen, wenn Spiel dann über den Motorencoder gehen, oder die Mechanik verbessern.
Kommentare (0)